
IACar – Usando uma rede neural para o controle da movimentação de um robô
O objetivo aqui é apresentar como podemos usar uma rede neural para tomadas de decisão. No caso deste artigo a rede neural deverá decidir se […]
O objetivo aqui é apresentar como podemos usar uma rede neural para tomadas de decisão. No caso deste artigo a rede neural deverá decidir se […]
TENSÃO E CORRENTE DE BATERIA Este sistema permite realizar o controle e monitoramento da carga de bateria utilizando o microcontrolador MTA 140xx/Callisto. Como pode ser […]
Introdução As placas de circuito impresso (PCI) possuem grande importância no âmbito da eletrônica e no processo de desenvolvimento de dispositivos. Apesar de não ser […]
Rtos: sistema multi-tarefas para sistemas embarcadosQuando se torna interessante o uso de freeRtos ? O sistema operacinal de tempo real, se torna uma solução quando […]
Para o projeto Ciclopes temos a necessidade de que o robô possa identificar o nível da bateria (combustível do robô). Dessa forma será demonstrado algumas […]
3 – Materiais e Métodos No capítulo a seguir serão apresentados os procedimentos utilizados no desenvolvimento do trabalho. No referido capítulo também serão descritos os […]
O trabalho de conclusão de curso proposto com esse tema está em fase inicial de desenvolvimento. Um dos primeiros passos a serem realizados é criar […]
Em meados dos anos 90 não existiam softwares capazes de gerenciar uma modelagem digital depois de concluído, o desenho paramétrico surgiu então como uma forma […]
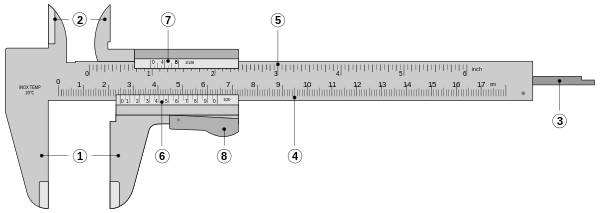
Muitos dos trabalhos realizados pelo grupo VisioRob dependem da elaboração de partes mecânicas e, desse modo, para garantirmos a precisão necessária utilizamos, frequentemente, um instrumento de medição chamado paquímetro.
No Linux os hardware são acessados por meio de arquivos de dispositivos especiais, e esses são armazenados no diretório “/dev.”, e as chamadas do sistema […]
Copyright © 2026 | WordPress Theme by MH Themes